您好, 歡迎來到化工儀器網
您好, 歡迎來到化工儀器網

西門子6SL3131-6AE15-0AA1價格實惠
西門子6SL3131-6AE15-0AA1
電子數基體上如原子數目。
2導電聚合物電極電化學電容器新進展導電聚合物電極電化學電祚器以通過屯極上屯戶導屯聚合物膜中發生快違,逆的13型或甩摻雜或去摻雜的氧化還原反應,使聚合物電極儲存高密度的電荷,具有很高的法拉第準電容,從而實現高密度的電能儲存。
以聚噻吩為例1其反應如下滕p摻雜去摻雜陽離子,是電子。
1型的兩個電極使叫相的,型摻雜導屯聚合物作為活性物質。當電容器充滿電時,有個電極上的聚合物膜處于非摻雜狀態,另個電極上的聚合物膜3是單個電極上活性物質的循環伏安,10是電化學電容器恒電流放電曲線1型電化學電容器上的個電極選用,型摻雜的導電聚合物,另個選用型摻雜的導電聚合物,兩個電極所用的聚合物可以相同,也可以不同。當電容器處于充電狀態時,個電極處于*,型摻雜態,1個電極處于完令甩摻雜態。這使1型電容器的初始電壓增加至3閣3.在放屯完畢時,它釋放出全部的雜電量,兩個電極上的聚合物都進入非摻雜狀態15.1型電容器的優點有1電壓窗口寬處于*摻雜狀態,電容器電壓是嘆典型的是1.
放電時,處于非摻雜狀態的聚合物被氧化被摻雜,13中的實線,處于摻雜狀態的聚合物被還原去摻雜,中的虛線,直到兩個電極都處于半摻雜狀態時,電容器的電壓為零。因此,放電電量只是滿摻雜時的半型的兩個電極使用兩種不同的,型摻雜物導電聚合物作為活性物質。當電容器滿負荷充電時,有個聚合物膜處攙雜狀態,1個聚合物脫處廠*摻雜狀態,電容器電壓是6典型的是1.5放電時,處于非摻雜狀態的聚合物被氧化被攙雜,摻雜,23中的虛線,直到兩個電極的電位相等,電容器的電壓為零。由于兩電極的摻雜電位范圍不同,因此,放電電量為0201.在放電時允許釋放的電量搡在總電量所1的比例史人,現在放電線廠面的面積更大。這就使得其比能量要比1型電化學電界器的高15.
3是單個電極上活性物質的循環伏安,實線是電化學電容器恒電流放電曲線,虛線是同器件在微分電容恒定情況下1型電化學電容器的般特征彡3,人1而具有較1的比能QdV;2在滿負荷充電狀態,兩個電極上的聚合物都處于摻雜導電態,因此比功率更大。
而1型和型電容器中有個電極上的聚合物膜處于摻雜的半絕緣狀態。這將使得滿負荷充電電界器的內阻較高,比功率較小;3所有的電荷都在較高的電壓下釋放,因此當電壓低到不能使用時比如說不能再驅動電動車的電動機時,電容器中己經沒有保留多余的電荷。因此1型電容器的電荷利用率很高,是類有應用前途的電容器。
3是單個電極上活性物質的循環伏安,化是電化學電容器恒電流放電曲線導電聚合物電有比能量高成本低可以通過分產設汁選擇不同的聚合物結構等優點,近年來這方面的研究較多。在保持電解液穩定的電勢范圍內,大多數導電聚合物可以可逆地進行,型摻雜和去摻雜,但是,只有少數導電聚合物能可逆地進行1型摻雜和去摻雜,而且還原電勢較高。這要求陰極穩定,而且是較純的無水無氧體系。尋找可以在較低還原電勢下可逆地進行型摻雜和去摻雜的導電聚合物,提高循環壽命是今后研究的個重入1 2.型電化學電容器新進展0邱比1段訂等16研宄了聚苯胺電化學電容器水洛液中恒電流聚介形成聚苯胺,采用4.1兒14水溶液作為電解液,得到了比能量為2.7比功率為1.0坫廠聚合物活件村料的電化學電容器。
CP 443-1 允許 S7-400 和以下設備通訊
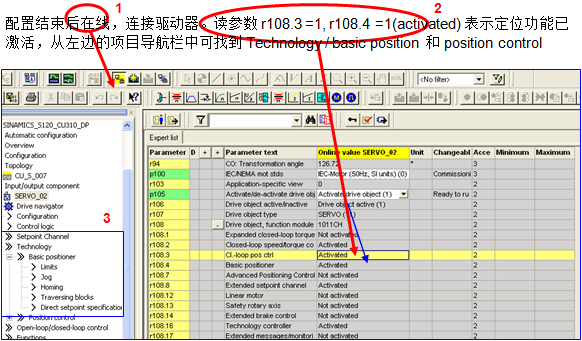
另外也可以在ONLINE情況下,通過參數表直接設置。使用PG/PC連接設備,在STARTER軟件中連接在線后,通過驅動器的Expert List打開參數列表,依次設置以下參數即可。
P0010=4, Encoder Commissioning 編碼器調試
P0411.0=Yes, Activate Position Tracking 激活位置跟蹤功能
P0412=600, Set Virtual Revolution 設置虛擬圈數,根據實際情況調整
P0010=0, Ready 返回就緒狀態
2.3 使用測量齒輪時的參數設置
針對1.2節中的例子,編碼器每溢出一次,都會在電機/負載側產生1/3圈的偏移,每溢出3次以后,編碼器零點與電機/負載的零點重新吻合。在編碼器溢出時,電機/負載的位置就可能不正確了。
此時需要激活位置跟蹤功能,并設置測量齒輪的齒輪比P0433和P0432,如圖7所示。本例中值編碼器是一個8圈的值編碼器,所以P0412=8。

圖7 測量齒輪的參數設置
這樣可以擴展位置值r0483的表示范圍(如圖8所示),在使用測量齒輪時,即使發生編碼器返回值溢出,也能正確指示電機/負載的實際位置。

圖8 位置跟蹤功能激活后的位置值
一、概述
S120 有兩種形式:
用于多軸系統的 DC/AC 裝置
用于單軸系統的 AC/AC 裝置
這兩種形式的 Firmware V2.4 及以上版本都已具備基本定位功能。當前V2.4 版本的 S120具有如下定位功能:
? 點動 (Jog): 用于手動方式移動軸,通過按鈕使軸運行至目標點
? 回零 (Homing/Reference):用于定義軸的參考點或運行中回零
? 限位 (Limits):用于限制軸的速度、位置。包括軟限位、硬限位
? 程序步 (Traversing Blocks): 共64個程序步,可自動連續執行一個完整的程序也可單步執行
? 直接設定值輸入/手動設定值輸入 (Direct Setpoint Input / MDI):目標位置及運行速度可由上位機實時控制。
使用 S120 基本定位功能的前提條件:
調試軟件:Starter V4.0 或更高版本 / SCOUT V4.0 或更高版本
硬件版本:SINAMICS FW: V2.4 HF2 或更高版本
注:
安裝 SCOUT V4.0 需要STEP 7 版本至少為 V5.3.3.1 以上
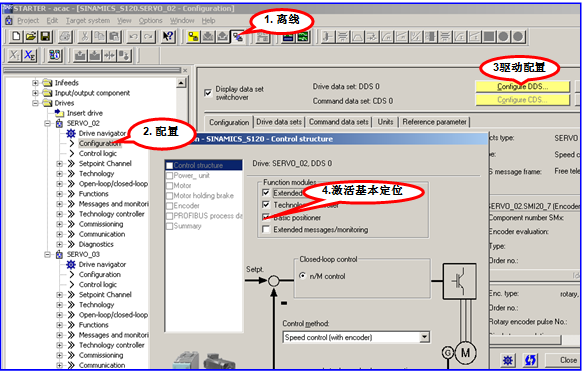
二、激活基本定位功能
S120的定位功能必須在變頻器離線配置中激活,步驟如下: